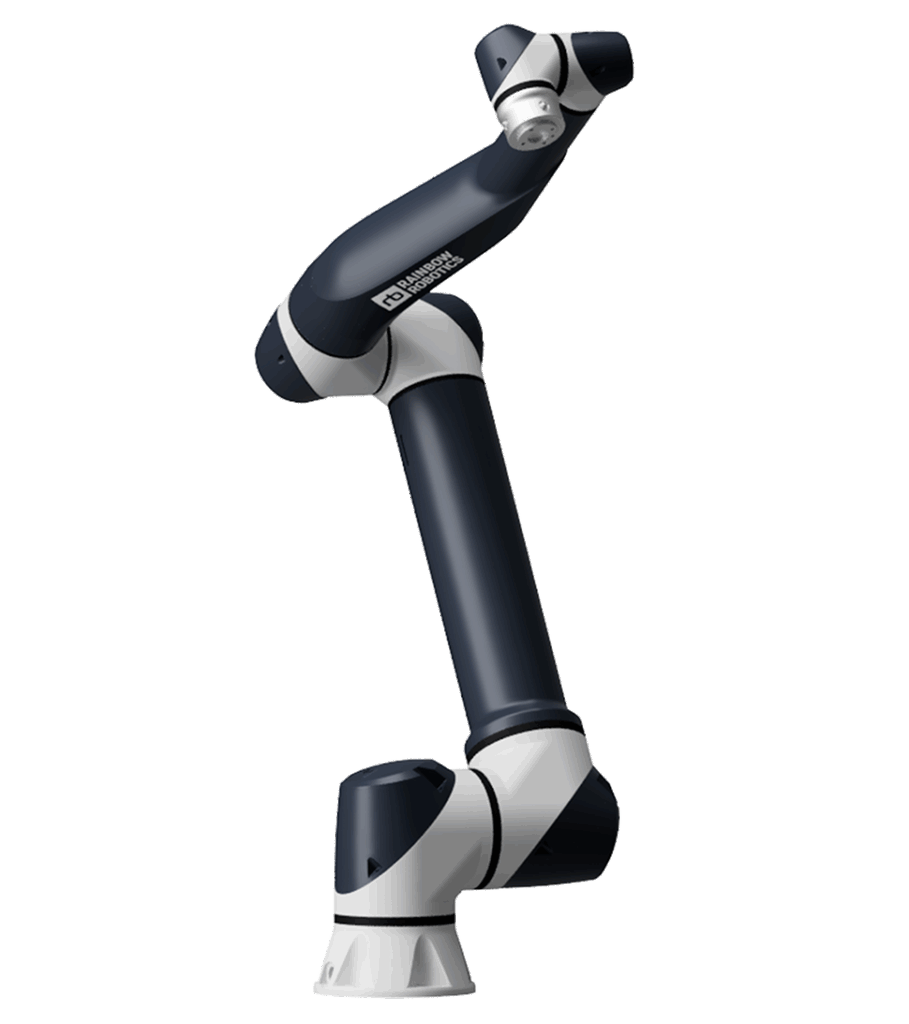





レインボーロボティクスのティーチングペンダントは、軽くて反応性に優れており、有線・無線で接続できます。また、1台のティーチングペンダントで複数のロボットを制御できます。

SubProgramとTemplate機能を使って過去に作成したプログラムを確認して読み込むことができます。なお、読み込まれたプログラムは自動的にグループ化されるため、一目で確認できます。

プログラムの作成中にロボットの位置を移動させることが多いですが、プログラミング画面の隣にジョグ(Jog)があり、ロボットを簡単に移動させ、コマンドを追加することができます。

ユーザーは、ON/OFFを選択し、すべての端子を制御できます。また、ピット組み合わせ出力、パルス 出力など、さまざまなオプションを提供します。

プログラムツリーでプログラムの要約を確認できます。 また、拡大/縮小ソスクロールなどの機能を使って内容をより正確に確認できます。

特定の変数の値を確認するデバッグ・モニタリング機能が搭載されています。プログラムの実行中ユーザーは、ポップアップから選択した変数を確認でき、モニタリング機能を使ってリアルタイムで確認することもできます。